
طراحی شیرآب هوشمندبه کمک چشم الکترونیک
طراحی شیرآب هوشمندبه کمک چشم الکترونیک
طراحی شیرآب هوشمندبه کمک چشم الکترونیک
چکیده
طراحی شیرآب هوشمندبه کمک چشم الکترونیک:در این مقاله طراحی شیرآب هوشمند
به کمک چشم الکترونیک طراحی شده است در این سیستم کلیه کنترل ها و صدور فرامین
توسط میکروکنترولر انجام می گیرد . در طراحی سیستم اصول پایداری و پایین بودن قیمت
رعایت شده است .
نتایج بدست آمده نشان میدهد که در زمان کمتر از ۵ ثانیه دمای خروجی سیستم به حوالی دمای
تعیین شده می رسد . این شیر آب با کمک چشم الکترونیکی جریان آب را قطع و وصل می کند .
۱-مقدمه
طراحی شیرآب هوشمندبه کمک چشم الکترونیک امروزه در بسیاری از کارها برای کنترل دقیق و
حفظ کیفیت بهتر از سیستم های کامپیوتری استفاده می شود و اتوماسیون با استفاده از کامپیوتر
یک امر عادی می باشد که در ابعاد مختلف زندگی انسان کاربرد فراوانی یافته است .
در این رهگذر مکاترونیک شاخه ای جدید از طراحی بر اساس اصول مهندسی الکترونیک و مکانیک
بوده که ابتدا در ژاپن و سپس در اروپا شکل گرفته است و به سرعت رواج پیدا کرد .
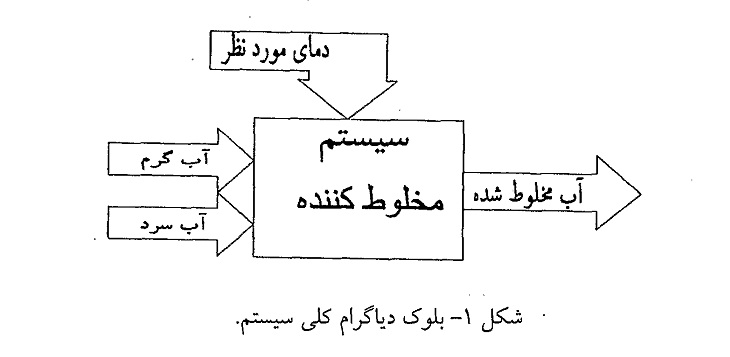
۲-بلوک کلی دیاگرام سیستم
شکل ۱ بلوک دیاگرام شیر آب هوشمند را نشان میدهد . در این سیستم عمل قطع و وصل آب و کنترل
درجه حرارت آن به طور اتوماتیک انجام می شود و کلیه عملیات توسط یک میکروکنترلر ، کنترل و هدایت
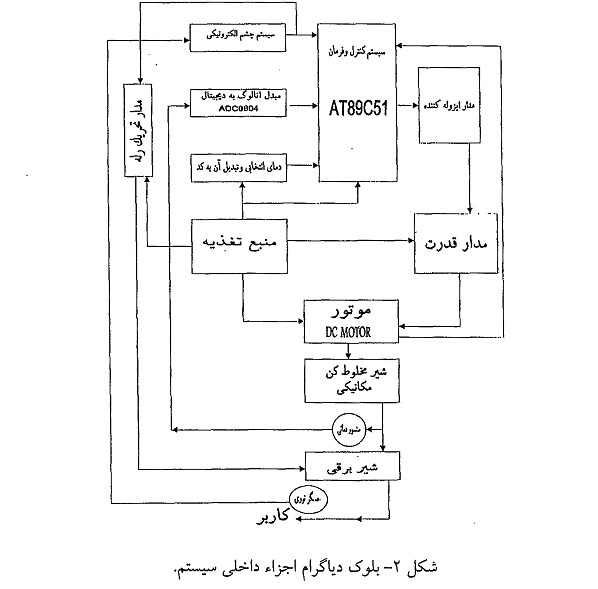
می گردد در شکل ۲ بلوک دیاگرام اجزاء داخلی سیستم که در بر گیرنده تمامی اجزا داخلی سیستم که در
برگیرنده اجزا الکترونیکی و مکانیکی آن است نشان داده می شود .
کار سیستم به این صورت است که با روشن شدن دستگاه ، میکروکنترلر شروع به کار کرده و منتظر
میماند تا مانعی ( دست انسان ) اشعه ی نوری ما بین دیود مادون قرمز فرستنده و فتوترانزیستور را
قطع کند در این حالت پالسی به مدار کنترل اعمال می گردد و همزمان پالسی نیز به مدار تحریک رله
ارسال می گردد .
پهنای این پالس برابر مدت زمانی است که مانع در مقابل اشعه نوری باقی بماند
با این کار مدار تحریک رله با این کار مدار تحریک رله با جذب دو عدد رله ۲۲۰
ولتی شیرها را باز کرده آب را به جریان می اندازد .
دانلودامکان سنجی مقدماتی احداث کارخانه چشم الکترونیک
دانلودامکان سنجی مقدماتی احداث کارخانه چشم الکترونیک
طراحی شیرآب هوشمندبه کمک چشم الکترونیک سیستم کنترل اختلاف دمای
درخواستی ئ دمای موجود را محاسبه میکند.
اگر این اختلاف دما بیش از ۲۰ درجه باشد پالسی با پهنای ۷/۰ ثانیه به موتور اعمال
میکند جهت چرخش موتور نیز با مقایسه دو دما بدست می آید .
اگر اختلاف بین ۱۰ الی ۲۰ درجه باشد پالسی با دمای ۵/۰ ثانیه اعمال خواهد شد
در صورتی که اختلاف دماها ما بین ۷ الی ۱۰ درجه باشد پالسی با پهنای ۳/۰ ثانیه
و در نهایت اگر اختلاف دماها ۳ الی ۷ درجه باشد پهنای پالس ۱۵/۰ ثانیه خواهد شد
و برای اختلاف دمای کمتر از ۳ درجه موتور خاموش می ماند .
بعد از این که پهنای پالس مشخص گردید و جت چرخش موتور نیز معلوم شد ،
میکروکنترلر تعداد دور موتور را با تعداد دور مینیمم و ماکزیمم مقایسه میکند و
در صورتی که مانعی برای راه اندازی موتور ، از نظر میکروکنترلر به مدت نیم ثانیه
کدی که منجر به خاموشی موتور می گردد را ارسال می نماید .
نکته مهمی که باید به آن اشاره نمود این است که در مدت زمانی که موتور کار میکند
و نیز در زمان نیم ثانیه خاموشی موتور ، میکروکنترلر بطور مداوم تعداد دور موتور
را اندازه گرفته و متناسب با جهت چرخش موتور با زمان تعداد دور مینیمم یا ماکزیمم
مقایسه میکند تا از حد مجاز خارج نگردد .
اما علت اینکه در حالت خاموشی موتور نیز ، این کنترل صورت می گیرد این است
که اگر احیانا این موتور دور بردارد و در حالت خاموشی نیز هرچند به میزان اندک
چرخشی نمای از قلم نیفتد .
بعد از اتمام نیم ثانیه باز هم دمای لحظه ای آب قرائت می گرددو دمای درخواست شده
نیز مجددا کنترل می شود و دوباره مقایسه دماها ، بدست آوردن اختلاف آنها ، مشخص
کردن جهت چرخش موتورها و پهنای پالس از سر گرفته می شود و این عمل آنقدر ادامه
میابد تا اینکه اختلاف دو دما به کمتر از ۳ درجه برسد ، در این حالت موتور خاموش میماند
و میکروکنترلر در انتظار تغییرات در یکی از دو دما یا هر دو ی آنها میماند ،
ضمنا در هر پریود پیغامی که از سیستم چشم الکترونیکی می رسد کنترل می گردد و
اگر در هر مرحله ای پیغامی مبنی بر بلا استفاده بودن شیر آب دریافت گردد میکروکنترلر
تمام کار خود را تعطیل می نماید و منتظر دریافت پیغامی مبنی بر استفاده شدن شیر آب می ماند .
تنوع شیرهای مخلوط کن زیاد است ولی شیرهایی که تنظیم دما در آنها توسط یک اهرم
صورت می گیرد ، مورد نظر می باشند .
برای اتصال اهرم به شیر مخلوط کن از یک سیستم گیربوکس با مشخصات زیر استفاده می گردد .
- نسبت دور موتور به دور اهرم شیر حداقل بایستی در حدود یک به صد انتخاب گردد .
- از سیستم چرخ و دنده مورب برای کاهش صدا های مزاحم استفاده می گردد .
البته لازم به ذکر است که قسمت های مکانیکی این سیستم نیاز به مطالعه بیشتر دارد و برای
کاهش تلفات انرژی ، بایستی از سیستمی با طراحی مناسب استفاده نمود .
دانلودامکان سنجی مقدماتی احداث کارخانه چشم الکترونیک
مبدل های دما در برابر تغییرات سریع دما واکنشی سریع نداشته و با تاخیر دمای
واقعی را نشان میدهد و زمان اندکی لازم است تا مبدل آنالوگ به دیجیتال عمل نماید .
به این ترتیب اگر سییستم کنترل با پالسی پیوسته نسبت به تغییر دور موتور اقدام نماید
ممکن است سیستم ناپایدار شود برایرفع این مشکل از روش پاس های گسسته در این
سیستم استفاده شده است که بعد از اتمام هر پالس به مدت نیم ثانیه تا شروع پالس بعدی
تاخیر ایجاد می گردد تا اختلاف دما مشخص شده و در صورت لزوم پهنای پالس کاهش یابد
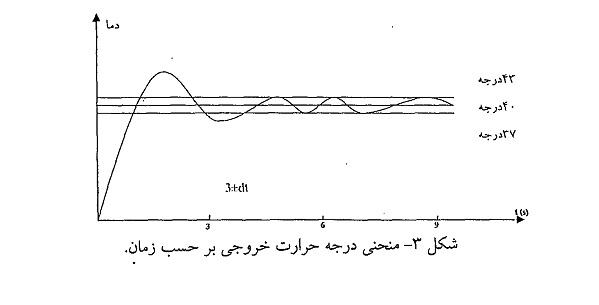
این مسئله میتواند به پایداری سیستم منجر شود در شکل ۳ منحنی تغییرات درجه حرارت
بر حسب زمان برای تنظیم درجه حرارت روی ۴۰ درجه نشان داده شده است همانطوری که
دیده می شود تقریبا بعد از ۵ ثانیه درجه حرارت خروجی سیستم در نزدیکی ۴۰ درجه قرار می گیرد .
دانلودامکان سنجی مقدماتی احداث کارخانه چشم الکترونیک
طراحی شیرآب هوشمندبه کمک چشم الکترونیک
۳-مدارهای قسمت های مختلف
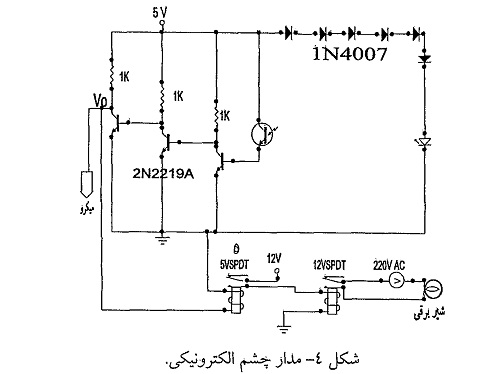
دراین بخش تعدادی ازمدارهای طراحی شده مطرح می گردد مدارفرمان شامل
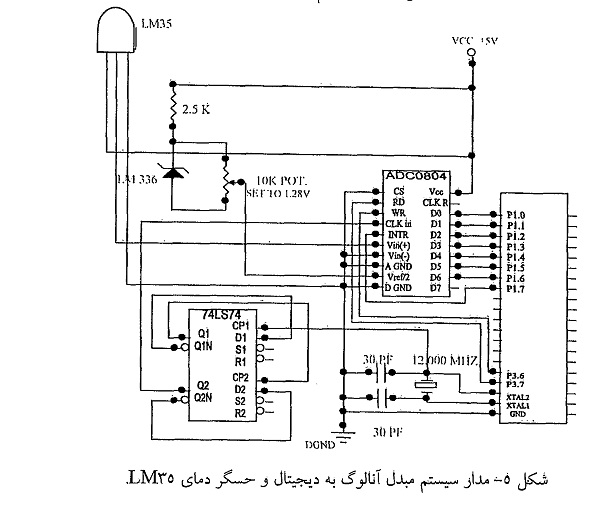
سیستم چشم الکترونیکی ( شکل ۴ ) ، میکروکنترلر AT89C51 ، سنسور دمایی
و مبدل آنالوگ به دیجیتال ADC0804 ( شکل ۵ ) ، سیستم انتخاب دما و تبدیل
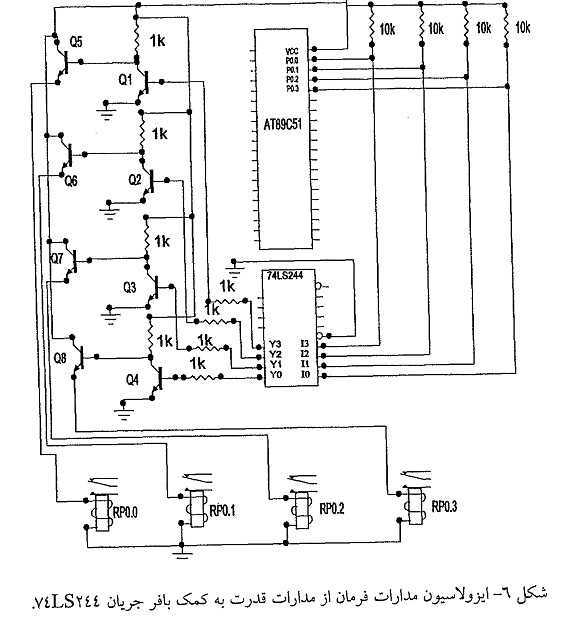
آن به اعداد در مبنای شانزده و بالاخره این ایزیلاسیون مدار فرمان از مدار قدرت میباشد (شکل ۶ ) .
طراحی شیرآب هوشمندبه کمک چشم الکترونیک
درمدارقدرت ازیک موتورDC،۱۲ولتی باجریان حالت بی باریA5/2استفاده شده است.
ساده ترین وارزان ترین روش تغییرپلاریته موتور استفاده ازرله میباشد.اگربرای تغییرپلاریته
ولتاژموتوردراین سیستم ازرله استفاده شودممکن است مشکلاتی پیش آیدکه درزیربه آنها اشاره می کنیم .
۱-سرعت قطع و وصل رله ها به دلیل داشتن قسمت های مکانیکی و مغناطیسی پایین میباشد .
۲-درمواردی که طول پالس کم باشد،گاهاکانتاکتوررله جوش میخوردودرمواقعی که بایدقطع باشد
درهمان حالت وصل یاجذب باقی می ماندوموجب اتصال کوتاه درمدار می گردد .
وجودچنین ایرادهایی دررله هااستفاده ازآنهارادرچنین سیستم هایی غیرممکن می سازدکه باوجود
ارزان قیمت بودن آنها نسبت به ترانزیستورهای قدرت،بایستی ازرله هاصرف نظرنمود .
در این سیستم ازچهارعددترانزیستورMOSFET(دوعددNMOSودوعددPMOS)استفاده شده است .
این ترانزیستورهابه گونه ای به موتورDCمتصل شده اندکه اگر هردو به اشباع روندولتاژی باپلاریته
متفاوت از همدیگربه موتوراعمال خواهندنمود .
شکل۷مدارقدرت استفاده شده دراین سیستم رانشان میدهد . همچنین در شکل۸منبع تغذیه سیستم
نشان داده شده است .


طراحی شیرآب هوشمندبه کمک چشم الکترونیک
۴-نتیجه گیری
سیستم طراحی شیرآب هوشمندبه کمک چشم الکترونیک ، توسط میکروکنترلر کنترل می شود در این سیستم ،
کنترل به صورت گسسته صورت می گیرد تا سیستم ناپایدار نشود .
نتایج علمی نشان میدهدکه بعدازحدود۵ثانیه دمای آب خروجی سیستم به دمای آب موردنظرنزدیک می شود .
در کلیه مراحل طراحی پارامترهای پایداری ، کاهش ابعاد و قیمت سیستم لحاظ شده است و در نهایت اینکه سیستم
به کمک چشم الکترونیکی جریان آب را به طور اتوماتیک قطع و وصل می نماید .
 فعل معتل و قواعد عربی
فعل معتل و قواعد عربی سپندار مذگان روز عشق ایرانی
سپندار مذگان روز عشق ایرانی همه چیز درباره روز ولنتاین
همه چیز درباره روز ولنتاین سال ۱۳۹۷ چه سالی است | رنگ سال ۹۷ |
سال ۱۳۹۷ چه سالی است | رنگ سال ۹۷ |
بازتاب: دانلودامکان سنجی مقدماتی احداث کارخانه چشم الکترونیک